
原文發表於《科技導報》2026 年第1 期 《 2025年無人機熱點回眸 》
2025年,無人機技術圍繞智能化、自主化、體系化和低成本化等方向發展,成爲推動低空經濟規模化應用與全球智能空域體系建設的核心驅動力。《科技導報》邀請北京航空航天大學段海濱教授團隊撰寫文章,從無人機技術革新、無人機關鍵技術、無人機應用驗證、反無人機戰術、無人機管控政策等多個維度,系統闡述2025年無人機技術的發展趨勢。技術方面,無人機正經歷從單點突破到體系協同的範式躍遷,在航路規劃、智能決策、通信組網等關鍵技術領域呈現出深度交織與協同進化的新特徵,無人機關鍵技術正向更深度的協同與感知演進。應用方面,無人機在軍事與民用領域的跨界融合與協同演進已成爲顯著趨勢。在全球低空經濟規模化落地的關鍵階段,通信組網的效能優化、異構平臺的智能協同以及安全可信空域的體系構建,已成爲全球技術競爭的前沿焦點,並共同推動形成人機物共融的無人機產業新生態。未來無人機將以分佈協同驅動、智能安全空域作底座,持續爲低空經濟高質量發展與數字化轉型注入強勁的新質技術動力。
2025年,無人機(unmanned aerial vehicle,UAV)時代進入到“泛在智能、系統融合”新階段,是低空經濟(low altitude economy,LAE)從規模化試飛發展爲規模化運營的關鍵驅動力。無人機是聯結物理世界與數字世界的重要“智能觸媒”,通過結合大語言模型、智能認知、強化學習等前沿技術,實現從感知智能、認知智能再到執行智能的閉環躍遷,推動城市空中交通、即時配送、智慧農業等綜合應用場景縱深發展,進一步融合數字智能、通信組網、空域信息,LAE正從單點效率提升邁向系統級生產力重構;尤其重要的是,基於羣體智能和跨域協同等關鍵技術,無人機正演化出具有自組織、自適應、自重構能力的體系化系統,LAE依託“技術驅動、生態反哺”的機制逐步形成新質技術迭代與應用場景相互促進的良性循環,不斷拓展其影響的深度。
本文從無人機技術革新、無人機關鍵技術、無人機應用驗證、反無人機戰術、無人機管控政策等多維度探討2025年的無人機代表性進展,系統梳理了演進脈絡、核心挑戰與未來發展的趨勢。
1 無人機技術革新
無人機的發展正經歷從單點突破到體系協同的範式躍遷,在航路規劃、智能決策、通信組網等關鍵技術領域呈現出深度交織與協同進化的新特徵。
1.1 無人機航路規劃
無人機自主飛行技術的突破源於感知、規劃與控制等核心模塊的深度融合與跨域集成,不僅顯著提升了系統的自主性與環境適應性,更爲其在未知動態場景中的可靠部署奠定了技術基礎。在此進程中,無人機航路規劃技術正在經歷從單機離線規劃向多機在線協同決策的範式轉變。
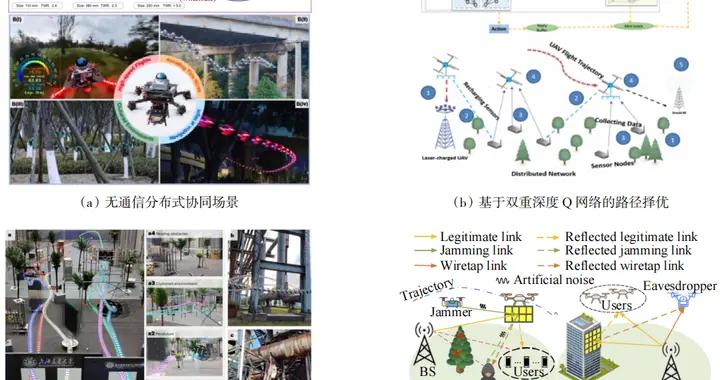
香港大學張富團隊在Science Robotics上發表的研究,設計了一款集成高推重比(>5.0)緊湊機身與輕量化三維激光雷達於一體的安全高速空中機器人系統(圖1(a)),該系統通過高推重比實現了敏捷機動能力,並藉助輕量化激光雷達完成了遠距離精確障礙感知,不僅實現了單機在未知環境中的高速自主飛行突破,也爲羣體協同中的軌跡優化提供了關鍵的硬件與感知基礎。
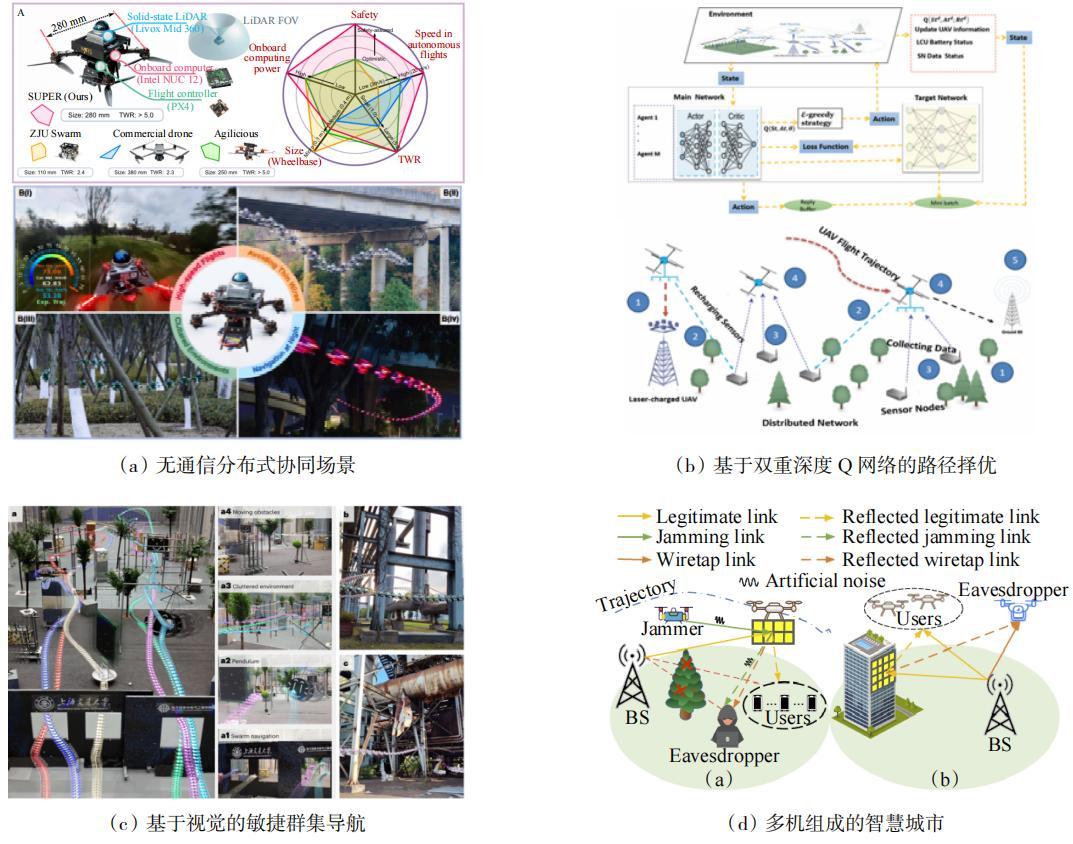
圖1 2025年無人機技術革新
基礎技術方面,路徑規劃目標範式已發生改變。過去路徑規劃的研究注重於求解如何在一個幾何空間內找到無碰撞路徑,而到2025年前沿工作研究的重點則是路徑規劃與任務的目的性和最優性匹配。
針對激光充電無人機支持的可充電無線傳感器網絡,Betalo等通過構建功率分配、動態充電策略與路徑規劃的聯合優化問題,實現了無人機在動態環境中實時調度充電與優化軌跡,該系統能夠在複雜環境中最小化任務完成時間與節點死亡時間,展現出異構系統內不同主體動態擇優路徑的能力(圖1(b))。
這一趨勢在端到端學習框架中得到深化,上海交通大學鄒丹平團隊在Nature Machine Intelligence上提出了一種融合無人機物理建模與深度學習的端到端方法,該研究首次將可微分物理訓練的策略成功部署到現實機器人中,實現了無人機集羣自主導航,並在魯棒性、機動性上大幅領先現有的方案(圖1(c)),僅憑機載傳感器便能在森林、動態障礙等複雜環境中實現20 m/s的高速魯棒飛行,並在多機場景中展現出無通信分佈式自主協同能力,在訓練效率與泛化性能上均超越傳統方法,標誌着無人機自主系統向感知−規劃−控制一體化邁出關鍵一步。
1.2 無人機智能決策
無人機智能控制系統正在經歷從指令執行向自主決策的關鍵轉型,這一演進主要得益於智能算法對複雜環境適應能力的大幅提升。在協同控制層面,分佈式優化方法的引入爲羣體智能的實現奠定了重要理論基礎。Zhang等設計的基於有向拓撲固定時間分佈式觀測器能夠保證無人機集羣在固定時間內實現狀態一致,提升集羣在複雜拓撲下的系統收斂速度。
在智能決策領域,基於多智能體強化學習的決策框架支持無人機集羣在複雜場景中完成協同搜索與資源調度,而緊耦合多傳感器狀態估計則爲動態環境下的高精度感知與可靠定位提供了基礎。這些技術共同構成了無人機實現自主協同決策與智能響應的核心支撐體系。例如,針對搜救場景中地面無線網絡覆蓋不足的問題,Soorki等設計了以無人機爲空中網關,基於深度元強化學習的自適應控制框架。該框架使無人機在山區峽谷等複雜未知環境中,能夠快速利用歷史任務經驗決策優化軌跡,高效搜尋被困人員,在實地測試中顯著降低了搜救時隙與能耗,體現了單智能體在動態環境中的快速學習與決策能力。在資源協同優化決策方面,Hwang等提出基於多智能體深度強化學習的無人機輔助移動邊緣計算網絡優化方法,通過神經網絡自主生成任務導向的交互消息,聯合優化無人機部署,在分散決策條件下實現了接近集中式方案的能效,並具有良好的規模擴展性。這2個方向分別從協同戰術決策與資源協同優化2個維度,共同推動了無人機智能決策平臺向更自主、更高效的系統發展。
無人機發展的另一關鍵推動力是多傳感器融合技術的進步,催生了更高層次上無人機自主性的實現。Irfan等設計的多傳感器緊耦合狀態估計系統通過緊耦合融合慣性測量單元(inertial measurement unit,IMU)、立體相機、全球定位系統(global positioning system,GPS)及雙激光雷達的數據,在GPS可用或拒止的多種複雜環境中均實現了高精度、高魯棒性的狀態估計,有效抑制了長期軌跡漂移。這類技術不僅爲單機在動態環境中的可靠運行奠定了基礎,同時也爲無人機的自主協同感知與羣體智能演進提供了一致的狀態估計支撐。
1.3 無人機通信組網
無人機的通信組網已超越基礎連接保障的範疇,正演變爲一種集智能環境感知與自主性能優化於一體的高階能力。這一轉變的核心在於智能算法與通信技術的深度自主協同。在第六代移動通信(6G)架構下,可重構智能表面輔助的無人機通信成爲空天地一體化系統的技術支撐。針對傳統通信組網依賴理想信道信息、模型單一及訓練耗時的問題,Huang等構建了面向四旋翼無人機的不完全信息通信與能耗模型,建立了通信吞吐約束下的能耗優化目標。
Cao等將分佈式自觸發控制和自適應控制相結合,使無人機羣具有馬爾可夫切換拓撲和信道衰落不確定條件下的最小負擔的包容控制穩定性,與Sharma等考慮的最優路徑不同。Ning等利用6G的新範式將無人機與智能反射面融合,創建了智能可控的無線環境,實現信號傳播機理的可變,開啓了超高可靠通信的新局面(圖1(d))。
智能組網的核心在於對網絡狀態的動態感知與資源優化,其技術路徑的差異則體現在應對不同挑戰的針對性策略上,例如優化路由協議、增強控制魯棒性等,爲高動態無人機網絡協同提供了關鍵技術支撐。無人機通信技術的突破不僅體現在協議算法上,更重要的是離不開新通信模式和高認知水平的自主協同技術的賦能。通過無證書同態網絡編碼簽名機制,可在提升傳輸效率的同時保障數據完整性與抗攻擊能力,而知識賦能的分佈式學習則推動無人機羣協作優化通信模型,支持複雜任務高效執行。最終指向一個趨勢,即在智能反射、內生安全、羣體學習等先進的技術支持下,無人機通信網絡朝着更高智能、更安全、更協同的方向演進,爲未來無人系統的應用發展奠定基礎。
2 無人機關鍵技術
基於上述無人機航路規劃、智能決策以及通信組網技術革新,無人機關鍵技術正向更深度的協同與感知演進,具體主要體現如下方面。
2.1 無人機多機協同
無人協同系統已從簡單算法模塊進化成更加深度融合的“感知−決策−規劃−控制”一體化系統,即在複雜動態環境下、有限機載資源和機體相互作用約束下實現自主作業。
目前,無人機在底層的運動規劃上出現了可擴展性的迫切需求,例如,Hou等研發的基元集羣(primitive swarm,PS)規劃器,特徵是把在線軌跡優化簡化爲基於運動基元庫的在線問題,在千機規模的密集協同仿真中達到毫秒級的選擇(圖2(a))。但高效協同在於一致的環境認知,所以輕量化語義的共享環境模型成爲感知層要解決的問題,Chen等設計的傳感器接觸式檢測框架將標準清晰度地圖和線上鳥瞰觀景圖像特徵信息融合,而且提出了專門的路口感知任務提高系統對“輕地圖”的場景理解魯棒性。同時,當前發展的特點也比較清楚地呈現在一個融合閉環之中,從輕量化協同感知、語義化建模一致的環境認知開始,Miao等針對多無人機自主協同探測過程中目標遮擋的問題提出一種基於改進麻雀搜索算法與模型預測控制的協同目標共識檢測與軌跡優化方法,有效提升了多無人機在複雜環境下的檢測效率與魯棒性。
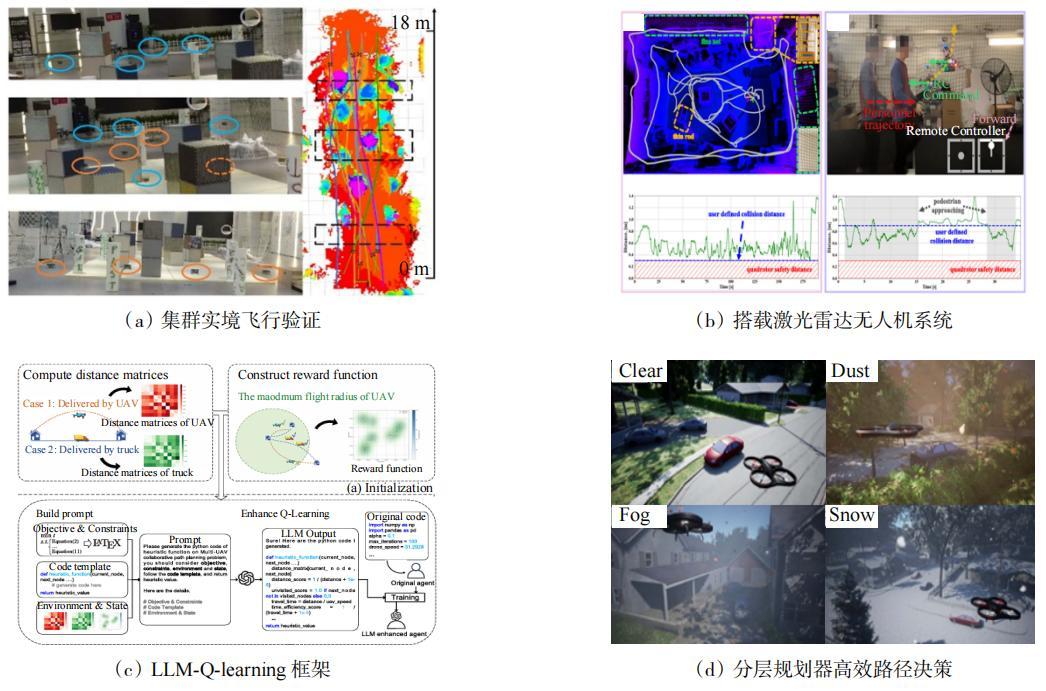
圖 2 2025 年無人機關鍵技術
處理無人機自主協同的問題核心,在於由依賴精確的模型控制發展爲具有較強適應能力、魯棒性和羣體智能的環境−任務一體化決策。在任務執行方面,強化學習的適應能力用於解決更復雜的動態情況,例如,Mondal等提出了一種基於多智能體強化學習方法,通過協同聯合優化無人機軌跡與用戶關聯,以最大化無人機在蜂窩網絡中的數據分流效率。Ullah等使用圖神經網絡對多智能體環境中的各個實體間關係進一步加深理解,從而在傳感器視野範圍較小的城市空域中規劃出可解釋性好、高效的多智能體自主協同圍捕策略。
2.2 多模態數據感知
無人機感知能力正經歷從環境信息採集向情境認知決策的範式躍遷,這一轉變構成無人機實現全方位感知智能的核心基礎。前端設備層儘量小巧輕便,低功耗,以實現先進的感知算法的邊緣計算;感知融合層則主動智能化地進行融合,提升全天候、全地形的強魯棒感知能力;系統算法層多智能體自主協同,破解單機物理硬件極限,實現分佈式羣體感知智能。讓無人機從飛行傳感器的被動角色中解放出來,成爲能夠主動理解並決策環境態勢的智能節點。
在設備層面,技術發展的核心矛盾已由對單一模型精度的追求,轉向對精度、效率與功耗的系統性協同優化,這在多模態感知智能領域尤爲突出:在海上監測任務中,Zhao等設計的海上目標識別框架通過深度融合自動識別系統與視覺數據,在邊緣端實現了高精度、高效率的船舶識別與跟蹤;
在無人機健康管理方面,Yang等搭建的融合多模態深度神經網絡模型利用多模態傳感器融合與並行特徵提取,顯著提升了異常檢測的準確性與噪聲魯棒性。
兩者均體現了通過數據與模型協同優化以實現綜合性能提升的技術路徑。這一趨勢將進一步推動技術向系統級解決方案演進。例如,香港大學張富團隊,針對山體滑坡防治工程中柔性攔石網的巡檢難題,開發了一款搭載激光雷達的四旋翼無人機系統(圖2(b)),集成FAST−LIO2里程計、增強型建圖與自主規劃控制模塊,在香港6處真實陡坡測試中,其複雜環境適應性與任務可靠性均優於大疆Mavic 3等商用平臺,體現了感知、規劃與控制深度融合的系統級優化方向。儘管多模態融合極大地增強了單機感知的魯棒性,但單機視野的遮蔽、定位誤差等物理限制無法抹去,因此,在系統層突破感知限制之前,多機協同3D感知顯得尤爲重要。多機感知與同步定位地圖構建(simultaneous localization and mapping,SLAM)技術相結合將使無人機在失去衛星導航信號的環境中擁有更高精度的自主能力。上述技術層面的演化,正是由具體應用中迫切的現實需求所驅動的。
2.3 無人機大模型融合
大語言模型(large language model,LLM)和視覺語言模型(visual language model,VLM)集成的無人機自主系統,無疑是一場大變革,模型之所以能帶來變革,其核心在於將強大的高級語義理解、全局推理與邏輯規劃能力,與無人機的高精度物理控制相融合,從而顯著提升無人機在任務規劃、自主決策及環境感知等方面的綜合性能。
在任務規劃、控制方面,LLM的全局推理優勢可用於解決複雜的組合優化問題。例如,考慮多無人機協同無人車送貨的多飛行器旅行商問題,Zhou等提出了LLM支撐下的Q−Learning方法,設計提示策略將複雜的調度問題轉化爲LLM可表達、可理解的形式(圖2(c)),幫助算法找到可行的方向,得到大規模問題的高質量解。將LLM或VLM直接接入無人機控制系統,會因模型自身幻覺和響應延遲等問題帶來潛在風險,爲此出現了多種協同式架構方案以應對上述挑戰。針對搜救等緊急任務中傳統深度強化學習仿真到實況遷移難的問題,Emami等提出了基於上下文學習的數據採集調度系統。
在此基礎上,爲進一步解決複雜危險環境中基於語義描述搜索特定目標的挑戰,Cai等提出了一種組合式神經符號系統方案。該系統通過集成神經符號感知、推理與概率世界建模,並採用分層規劃器進行高效路徑決策,在仿真城市搜索任務中實現了超越現有基線的感知與規劃性能(圖2(d))。
更進一步,LLM的應用正從任務理解擴展至系統級資源協同優化。例如,在集成感知與通信的多無人機網絡中,Li等提出一種基於LLM的分解式多目標進化算法,將通信效用最大化與用戶定位精度最優化的非凸問題分解,並利用LLM作爲黑盒搜索算子進行聯合優化,在無人機部署與功率控制中找到了清晰的帕累託前沿,其性能在收斂性和解集質量上均優於傳統多目標進化算法。
因此,目前基於LLM/VLM的無人機感知智能化研究正朝着一個融合路徑演進,它們的共同目標是打通從高級語義指令到可靠物理控制與多目標系統優化的完整決策鏈路,最後構造出高認知、強解釋、精泛化的下一代自主無人機。
3 無人機應用驗證
無人機在軍事與民用領域的跨界融合與協同演進已成爲顯著趨勢。從軍事視角看,2025年呈現出多維度、體系化的重要突破:
美國協同作戰飛機(Collaborative Combat Aircraft,CCA)項目下的YFQ−42A及YFQ−44A 2種原型機,分別於2025年8月與10月成功完成首飛,標誌着有人−無人編組作戰進入工程驗證階段,爲後續與F−47等六代機構建協同空中作戰體系提供了關鍵支撐;中國在高端平臺協同方面亦取得重要進展,攻擊−11玄龍隱身無人機與殲−20威龍隱身戰鬥機首次公開編隊飛行(圖3(a)),體現了在高對抗環境下有人/無人平臺協同偵打一體的實戰化概念驗證;與此同時,在低成本無人機作戰創新領域,中國人民空軍舉辦了“極低成本無人機競優比測活動”,廣泛邀請全社會無人機企業參與技術打擂臺,進一步推動相關能力體系的開放化、敏捷化發展。
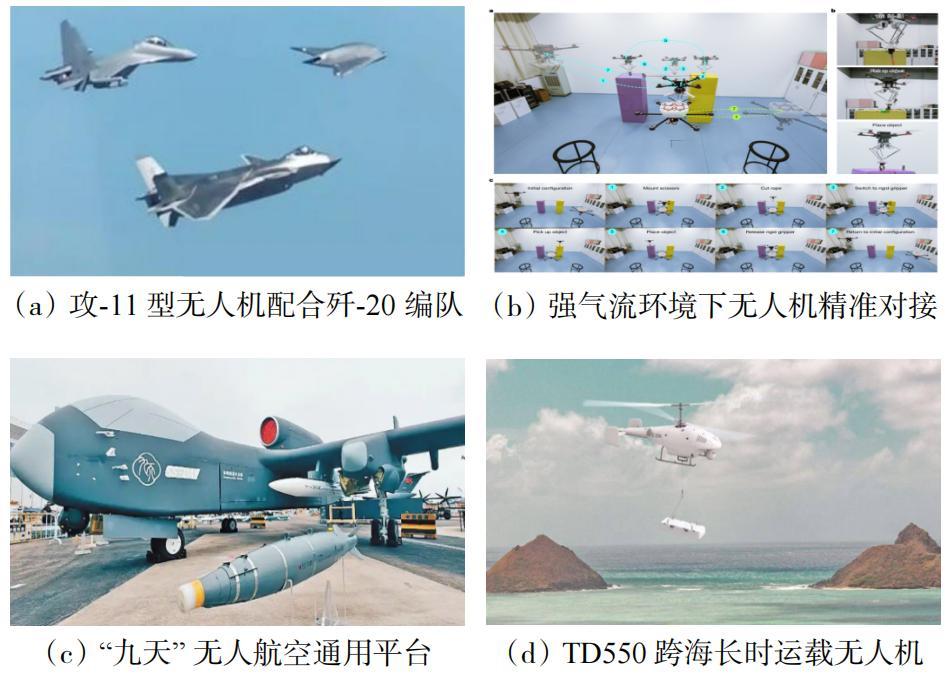
圖 3 2025 年無人機典型應用驗證
除此之外,全球範圍內無人機空戰能力建設也取得實質性進展:土耳其紅蘋果無人機成功實施遊隼超視距對空導彈實彈射擊,澳大利亞MQ−28A幽靈蝙蝠無人機平臺也首次完成AIM−120中距對空導彈發射試驗,這表明無人機已逐步從情報、監視、偵察平臺向具備制空、防空壓制能力的多功能作戰節點演進。
在實戰層面,無人機在地區衝突中呈現複雜多樣的攻防博弈,從紅海上的低成本蜂羣進攻到高端艦上防禦的成本較量;在俄烏戰場上,俄羅斯部署50 km光纖遙控實現超視距精確打擊的第一人稱視角(FPV)無人機,與烏克蘭依託人工智能(AI)電磁對抗技術展開的快速攻防迭代,持續推動戰場形態演進;中東地區則凸顯了隱身無人機滲透與一體化防空體系之間的高端能力比拼,全方位檢驗了現代化戰爭的新型攻防樣式。這些嘗試表明,無人機已從戰場輔助角色演變爲影響現代戰爭進程的關鍵要素,推動系統向綜合化、智能化和協同化方向快速演進。
在技術層面,無人機系統正突破傳統作業限制,例如垂直堆棧近端協同控制這一長期技術瓶頸獲得突破。西湖大學趙世鈺團隊研發了協同空中操控系統(flying tool box,FTB),完成了多架旋翼無人機的空中工具交換,實現了“疊式”飛行狀態下的高精度協同作業,其異體無人機間工具交接精度達到亞釐米級,即使在13.18 m/s的強氣流環境下仍能保持精準對接,爲解決飛行接近度與操控精度的矛盾提供了新的技術路徑(圖3(b))。在此基礎上,無人系統競賽成爲推動技術迭代和人才培養的重要機制。2025年“申達杯”智能無人系統應用挑戰賽通過多科目設置,全面考覈無人系統在複雜環境下的自主協同能力,促進了產學研深度融合。
無人機技術的融合發展,在技術路徑與能力構建上呈現出顯著的協同互補。軍事領域對隱身、抗干擾、集羣控制等能力的嚴格要求,持續驅動新材料、通信、感知智能算法等技術的突破,2025年成功首飛的彩虹−7高空高速隱身無人機,標誌着中國在隱身設計與高速突防能力上取得重要進展,進一步拓展了無人機作戰體系的高端應用場景;彩虹−9中高空長航時無人機以24.8 m翼展、萬米高空40 h待機的綜合性能,在航時與覆蓋範圍上實現跨越,智能航路規劃與自主載荷控制能力顯著增強了其在複雜戰場中的穿透力,正成爲重塑未來戰爭樣式的新型戰略裝備;同期在陝西完成首飛的“九天”大型通用無人機平臺(圖3(c)),採用“通用平臺+模塊化任務載荷”設計理念,具備大載重、高升限、寬速域、短起降等核心優勢。與此同時,中航工業集團自主研發的高空長航時翼龍X無人機續航已超過40 h,能夠支持多機協同與模塊化任務載荷,展現出較強的持續作業與體系協同能力,而民用場景對輕量化模型、實時處理、高可靠運行的需求,又爲軍事無人機平臺的長時作業能力、戰場適應性與實戰可用性提供了重要技術反哺。例如,聯合飛機集團TD550無人機完成51.4 km跨海飛行,載重100 kg,時效較傳統航運提升75%(圖3(d)),這也表明未來無人機的發展更應該是技術在複雜環境下的自主、智能、融合作用。
各類高端的國際大賽成爲集羣技術跨越式發展和部隊應用推廣的有效工具。算法上,無人機感知智能正朝着更具認知與模型驅動決策的方向演進。從通信角度看,5G−A/6G實現的通信、感知、計算一體化的網絡能給大規模集羣提供超時延、高可靠、強感知的能力,使得上千架大小的編隊密集控制、避障協同等成爲可能。賽事設置上的賽場極端化、任務複雜化、對抗劇烈化成爲一個明顯特徵。中國無人機競速聯賽把任務的難度推向一種全新局面,讓不同外形的多架無人機在無外部導航信號的環境下,進行無人機的搜索、跟蹤和空中攔截任務,帶動了視覺激光SLAM、具有跨平臺抓取的飛行器協同抓取等技術能力的實戰化。
4 反無人機戰術
2025年,反無人機戰術的重點已不再是探測、識別、攔截的流程變換,而是感知智能、協同決策與敏捷反制的對抗新智形態。針對低空、慢速、小目標與無人機羣襲等威脅,單一傳感器侷限性的束縛被完全打破,多點協同感知是新方向。
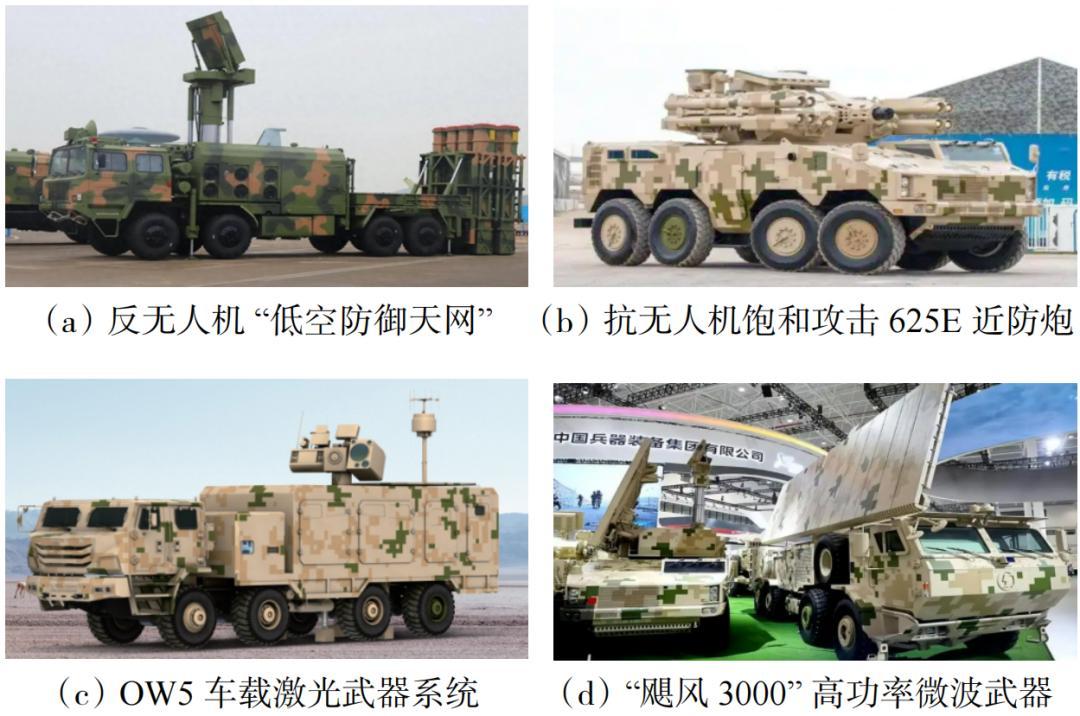
圖4 2025 年反無人機戰術
反無人機技術正經歷從單點防禦向探測−決策−攔截全鏈條融合的體系化深刻變革。
在探測層面,通過分佈式雷達、光學與無線頻譜傳感器的深度協同,構建廣域抗干擾的協同探測區。以2025年九三閱兵亮相的“鐵三角−低空防禦天網”系統爲代表,其動態頻譜認知與射頻地理適配算法,顯著提升了複雜電磁環境下目標識別精度與抗虛警能力(圖4(a))。
在決策層面,感知智能技術實現從看見到理解的關鍵跨越。第二屆空軍“反無爭鋒−2025”創客大賽集中展示的集羣戰術圖譜解析等新概念,能夠通過實時行爲分析預測飛行意圖,爲分級攔截提供關鍵決策窗口。
在攔截層面,高效能、低成本的多模協同成爲裝備發展主線。第71集團軍列裝的625彈炮合一系統是典型代表,其融合近防炮與防空導彈(圖4(b)),形成梯次火力配系,專爲優化反無人機效費比而設計,體現了軟硬殺傷結合、體系協同的先進防禦理念。
這三者共同勾勒出以體系化探測、智能化決策與多元化攔截爲核心的新一代反無人機作戰範式。
反無人機攔截和對抗能力的智能化特色呈現軟硬結合、網絡同步與效應可控等特點。高能激光武器正從固定部署向機動化方向發展,其高精度光束引導與大氣補償控制能力,可有效攔截中、低空多批次目標(圖4(c))。高功率微波武器則主要應對集羣飽和式攻擊,具備面殺傷優勢,其作用範圍和功率水平均已實現顯著提升(圖4(d))。在軟殺傷方面,協同認知電子戰已浮出水面,系統可以自主學習並生成適用於無人機導航、通信協議的欺騙信號,接管或驅散無人機,附帶損壞較少。例如,美國國防高級研究計劃局(Defense Advanced Research Projects Agency,DARPA)“小精靈”項目第二階段就可實現若干無人機羣對敵方無人機空中射頻壓制和“捕蟲子”。
當前,反無人機體系已超越單點裝備的簡單疊加,深度融入全域防空體系,形成多域協同、體系對抗的作戰新範式。例如,美國陸軍正在擬建的多層無人機防禦系統中,前端是各級部署的傳感器,中端是統一控制器,後端是各種關聯效應器,這一切無縫鏈接爲基地防護、機動兵種伴隨防護等提供了機動靈活配置。歐洲反無人機穹頂工程同樣體現了軍民融合的一體化防禦思路,其通過構建區域性網絡,整合機場、核電站等國家關鍵基礎設施部署的傳感器告警信息,實現對威脅的實時預警與協同研判處置。
5 無人機管控政策
5.1 飛行安全
隨着LAE從示範、試飛過渡到規模化運營,2025年全球無人機和新型航空器的管控政策熱點從規則建立轉變到強制性規範和商業化開放。國內外管理局出文配套強制性規章操作要求及使用規則,以構建安全、經濟、可預測的商業化運行環境。在中國,這是對接《無人駕駛航空器飛行管理暫行條例》的一次實質性落地。中國民用航空局於2025年初推出落實的《民用無人駕駛航空器系統運行識別規範》具體規定了無人機運營人員管理全流程、操作手冊,詳細界定了無人機適航審定、運行審覈、運行事件調查等適用程序,是無人機管理到照章辦事實操階段,給各類的商業化運行提供了可預期的規範依據。
除此之外,2025年歐洲的無人機空管也迎來重要跨越。歐洲的《U−Space空域管理計劃》從2025年1月1日起強制使用,在被指定爲U−Space的空域,無人機必須加入認證的數字化服務,實現飛行計劃的自動申報與全程實時監控,這意味着歐洲無人機空管從自願的試驗性服務,全面升級爲與有人駕駛航空同等級的強制性基礎設施,爲未來大量高密度空域融合運行奠定了法律與技術基礎。美國支持力度也是空前的,聯邦航空局頒佈的新規《動力升力集成:飛行員認證與操作SFAR》,爲先進空中機動行業確立了新型動力升力飛機的運行與飛行員培訓框架,被視爲推動該行業發展的關鍵舉措。
5.2 飛行認證
2025年,全球無人機管制政策在隱私防護、飛行認證等方面趨嚴、趨細的特徵更加突出。
隱私保護方面,國家標準化管理委員會印發的《民用無人駕駛航空器實名登記和激活要求》強制規定關鍵行業無人機數據境內存儲;對無人機飛行公共區域提出個人數據脫敏要求。歐盟修改版的《無人機運營、數據隱私準則操作和遵從指南》嚴格遵守數據隱私保護法規(general data protection regulation,GDPR)的原則,嚴格要求隱私影響評估與最小化數據採集。美國增加對商業數據使用的限制,禁止以商業目的使用獲取的數據。
飛行認證方面,各國推行全流程數字化管理:中國推出無人機適航電子標籤驗證綁定,歐盟推出對C、D類機型分級認證,美國推出超視距飛行(beyond visual line of sight,BVLOS)設備名單簡化管理。
在操作員認證方面,國際上建立基礎級、高級、導師級3級國際安全標準體系,並通過強制配備責任險、推行安全管理體系認證,明確數據分析管理的合規底線與運行標準,有利於無人機商業運營安心落地。
5.3 低空經濟
2025年,世界進入LAE深度融合與規模化發展新階段,各國在政策佈局與關鍵技術攻關上共同發力,推動全產業鏈走向成熟。2025年,在中國十四屆全國人大常委會第三次會議和全國政協十四屆三次會議上,LAE成爲備受關注的議題,並被明確寫入政府工作報告,確立了其作爲國家戰略性新興產業的重要地位。政府工作報告明確提出“推動低空經濟等新興產業安全健康發展,同時《中華人民共和國民用航空法》修訂草案進入審議階段”,旨在爲LAE發展提供必要的空域資源與制度保障。在更長期的戰略佈局上,《中共中央關於制定國民經濟和社會發展第十五個五年規劃的建議》進一步強調,要“加快新能源、新材料、航空航天、低空經濟等戰略性新興產業集羣發展”,從而在頂層設計上將其納入國家現代化產業體系的核心組成部分,爲產業長期健康發展奠定政策基礎。在“新一代人工智能”行動賦能下,LAE正推動無人機技術、通信網絡與智能感知系統融合,構建起覆蓋城市管理、物流配送等多場景新型基礎設施。
在人才培養方面,教育部在2025年度普通高等學校本科專業申報中,將“低空技術與工程”列爲擬新增數量最多的專業,共有120所高校獲批,標誌着相關領域的人才培養進入規模化、系統化建設階段。
在空域集成與管理方面,國家空管委批覆設立了首批“國家級低空融合飛行示範區”,在長三角、粵港澳大灣區等區域開展動態空域釋放、有人−無人機聯合運行管理等新模式試驗。通過實施“動態空域釋放”與“空域時序化利用”機制,有效激活了300 m以下空域的碎片化資源,爲物流運輸、城市巡查等商業化場景提供了可行模式。歐盟同步推進U−Space空管框架的強制實施,在機場與城市核心區要求無人機必須接入經認證的數字服務系統,實現飛行計劃自動協同與實時監控,系統每小時可協調超10萬架次無人機。
美國也在政策層面加快佈局,通過修訂《遠程識別規則》,擴大無人機超視距運行授權範圍,進一步推動空域商業化進程。
在技術層面,支撐LAE運行的理論體系與關鍵系統持續完善。
在通信與網絡架構方面,面向LAE的網絡架構被系統建立,Jiang等從統計信道建模、空地通信接入、頻譜共享、三維波束賦形、干擾協調等方面開展研究,並進一步探索航空器在目標感知、廣域覆蓋、中繼傳輸與流量分流等方面的潛力。
在定位感知方面,劉啓瑞等針對衛星與視覺導航在低空環境中觀測受限、抗干擾弱等問題,融合6G網絡的定位感知理論與關鍵技術正推動系統向更高可靠性演進,相關研究聚焦於弱覆蓋區域連續定位、高動態節點聯合感知、異構信號體制評估及跨域數字孿生等核心科學問題。
在系統性能層面,氫燃料電池使多旋翼無人機續航突破4 h,5G−A/6G低空專網可提供毫秒級端到端通信,毫克級飛行器實現類昆蟲續航能力並完成持續1000 s懸停,壽命提升2個數量級。
隨着政策體系的完善、技術創新的迭代與應用場景的拓展,LAE已從概念探索階段步入規模化、體系化發展的快車道,全球低空產業鏈正加速成熟,一個集智能製造、智能運維與智能服務於一體的新生態逐步形成。
6 結論
本文對2025年無人機技術領域等代表性進展進行了全面回顧與系統梳理,重點圍繞無人機技術革新、關鍵技術、應用驗證、反無人機戰術以及無人機管控政策等5個維度進行剖析。
在無人機智能決策方面,基於深度強化學習的智能自適應控制使得無人機對複雜環境更加適應,在環境感知和實時自主決策能力方面得到大幅提升;在無人機集羣協同方面,結合分佈式優化技術與新型集羣控制通信技術實現了多無人機集羣的優化;在無人機LAE政策方面,出臺了無人機LAE試驗區與新低空管理政策爲無人機商業應用發展保駕護航。
2025年無人機技術迅速發展,推動無人機邁向智能化、自主化、體系化和低成本化的進程,爲有效解決無人機面臨的“有智無慧、有感無情、有專無通、有協無同”問題提供關鍵技術支撐。
本文作者:段海濱、梅宇、牛軼峯、趙彥傑、袁洋、王寅、羅德林、袁莞邁、張兆宇、袁永瓊、範彥銘、朱紀洪作者簡介:段海濱,北京航空航天大學,教授,研究方向爲無人機仿生自主控制、計算機仿生視覺和仿生智能計算。
文章來 源 : 段海濱, 梅宇, 牛軼峯, 等. 2025 年無人機熱點回眸[J]. 科技導報, 2026, 44(1): 91−101.

內容爲【科技導報】公衆號原創,歡迎轉載白名單回覆後臺「轉載」
☟
《科技導報》創刊於1980年,中國科協學術會刊,主要刊登科學前沿和技術熱點領域突破性的研究成果、權威性的科學評論、引領性的高端綜述,發表促進經濟社會發展、完善科技管理、優化科研環境、培育科學文化、促進科技創新和科技成果轉化的決策諮詢建議。常設欄目有院士卷首語、科技新聞、科技評論、本刊專稿、特色專題、研究論文、政策建議、科技人文等。