【文/觀察者網專欄作者 白玉京】
12月30日的夜晚,是一個讓無數印度人沸騰、狂歡的不眠之夜。
這一夜,印度向全球直播首次太空交會對接任務(SpaDeX)的火箭發射任務。如果對接實驗成功,印度將成爲全球第四個掌握太空交會對接技術的國家。

印度的歷史性一刻,注意火箭的PSLV-C60字樣,將實現印度太空對接的夢想。圖片來源:ISRO
合作目標交會對接
載人航天的三大關鍵技術是太空交會對接、載人天地往返和出艙活動。對載人航天有着狂熱執着和長遠規劃的印度此次首次太空對接,就是爲印度將來實施載人航天任務、建造印度自己的空間站、乃至載人登月作準備。
1966年3月,美國雙子星8號飛船與阿金納目標飛行器對接,完成歷史上首次太空對接;1967年10月,蘇聯宇宙188號飛船與宇宙186號飛船實現了世界上首次無人自動交會對接;2011年11月,中國神舟八號和天宮一號實現了自動交會對接。儘管日本的HTV和歐洲的ATV這兩款飛船,跟美國主導建造的國際空間站完成了對接,但也只是個半調子,不掌握全套核心技術。
印度對首次太空對接試驗寄予厚望的同時,也信心滿滿,發揚了一箭多星太空種土豆的精神,希望一次發射全面豐收。PSLV-C60火箭的主任務是發射兩顆各約220公斤的小型航天器,分別爲SDX01(追蹤飛行器)和SDX02(目標飛行器)。必須注意,這兩個航天器並非一次性用品。

印度SDX01(追蹤飛行器)和SDX02(目標飛行器),注意對接機構相對。圖片來源:ISRO
PSLV火箭的實用價值被充分榨乾,將載有24項科學載荷火箭,火箭本體的第四級,被稱爲PS4軌道實驗艙,成爲驗證載荷的實驗平臺。
印度首次太空對接重點驗證合作目標交會對接,也可能會驗證非合作目標交會對接。合作與非合作其實很好理解,通俗來說,兩個航天器有自主配合能力的就是合作,其中一方沒有這個能力的就是不合作,比如美國航天飛機捕獲太空望鏡進行維修,或是中國曾用一顆衛星捕獲另一顆衛星拖到太空墳場軌道。
我們先聊聊合作目標交會對接,一般來說分爲遠距離導引段、近距離導引段、逼近段和對接段。印度首次太空交會對接試驗流程如下:
PSLV-C60火箭將兩個航天器送入高度約470公里、傾角55°的圓形軌道。
通過精確控制,發射時爲目標和追蹤航天器提供微小的相對速度,使它們在一天內達到10-20公里的相互間距。
隨後,追蹤航天器將逐步接近目標航天器,經過5公里、1.5公里、500米、225米、15米和3米的距離,最終實現對接。
成功對接並固定後,將演示兩顆衛星之間的電力傳輸,然後分離,開始各自的有效載荷操作,預期任務壽命可達兩年。
這次將驗證的核心技術,包括不限於:
· 對接機構
印度的對接機構是一種低衝擊對接系統,接近速度約爲10毫米/秒,採用“異體同構”設計,即追蹤航天器和目標航天器的對接系統相同,並且是當前國際主流的周邊式對接系統。美蘇古早的環-錐式和杆-錐式早已淘汰,周邊式對接系統的好處是通用性好,兩個航天器對接裝置相同,生產維護相當便利。
在執行太空任務時,如果不同航天器都採用這種通用的周邊式對接系統,那麼它們之間相互對接的可能性和便利性就大大增加,無需針對特定對接對象去專門改造或配備特殊對接設備,就如同使用統一接口標準的插頭和插座一樣,不同設備間更容易連接配合。中美俄的對接系統轉移通道直徑約800毫米,印度試驗型的對接系統直徑約450毫米。

對接機構特寫,可見“異體同構”設計。圖片來源:ISRO
· 交會與對接算法
SDX01和SDX02距離達到5公里時,會採用印度空間研究組織低地球軌道航天器中所運用的標準軌道維持和姿態控制算法。由於航天器處於圓形軌道,對衛星速度的任何增減都會導致軌道變化,因此採用了基於多脈衝(n-Pulse)、下滑道(Glideslope)以及比例導引(PV)制導算法的V-bar策略,以縮小衛星間的距離,在固定的衛星間距離處保持穩定,以便對傳感器和軟件進行評估,最終實現對接。這些算法被轉化爲軟件,用於實現交會和對接。
· 航天器定位
SDX01和SDX02都搭載了基於差分全球導航衛星系統的衛星定位系統,提供定位、導航與授時功能。通過對追蹤航天器和目標航天器的SPS接收機中來自相同全球導航衛星系統衛星的載波相位測量值做減法運算,便可確定這兩顆衛星高度精確的相對狀態。SDX01和SDX02的甚高頻/特高頻收發器通過星間鏈路,將全球導航衛星系統衛星的測量數據從一顆衛星傳輸至另一顆衛星。
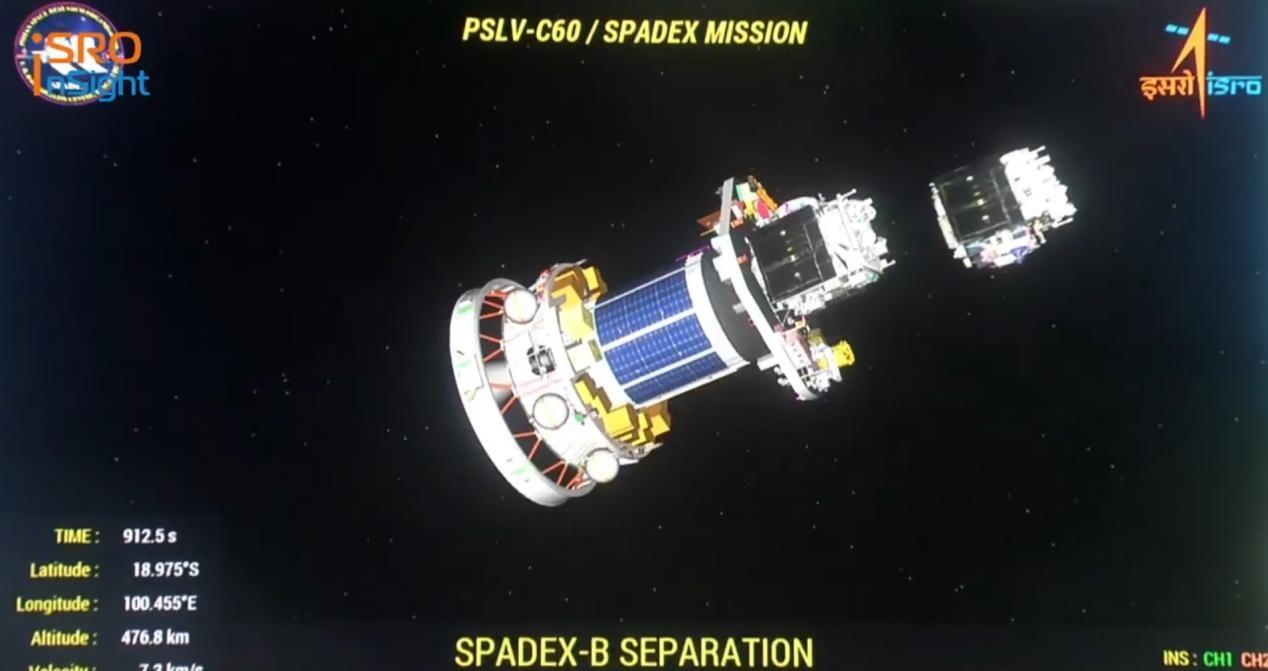
印度SDX01和SDX02分離成功。 圖片來源:ISRO
非合作目標交會對接
此次印度驗證非合作目標交會對接,實在是讓人刮目相看。非合作目標交會對接的難度和複雜度要大得多。這種情況下,目標航天器並不是爲對接任務設計的,可能根本沒有標準的對接接口,也沒有能力精確調整姿態,而且衛星碎片等太空垃圾的軌道參數、質量結構都不一定明確可知。
機械臂是非合作目標交會對接的關鍵設備之一。可用於目標捕獲與抓取、姿態調整輔助和近距離操作保障。機械臂一般有着多個自由度的關節,可以在三維空間中實現多種複雜的運動姿態組合,其設計非常複雜,研發難度比較高。
比如加拿大爲國際空間站研製的“加拿大臂2”有7個自由度,這使其能夠像人的手臂一樣靈活地彎曲、扭轉、伸展,從而適應不同形狀、不同姿態非合作目標的抓取和操作需求,能夠到達追蹤航天器周邊不同方位去完成任務。中國在天宮空間站部署的一大一小機械臂水平也非常高,不光可以在艙體爬行,雙臂甚至可以協同工作。
PSLV-C60任務中POEM-4上的24個有效載荷,排名前二的就是RRM-TD行走機械臂和太空碎片捕獲機械手。RRM-TD是印度第一臺具有行走能力的太空機械臂,也有7個自由度,可爬行到指定位置。太空碎片捕獲機械手利用視覺伺服和物體運動預測來捕獲繫繩連接的碎片。在首次實驗成功演示之後,未來將具備捕獲自由漂浮碎片,以及爲繫繩連接和自由漂浮的航天器進行燃料加註的能力。
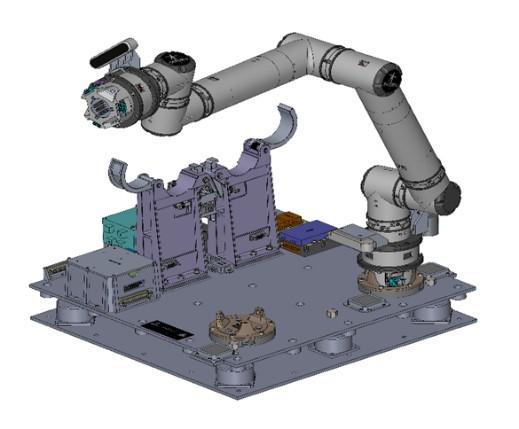

上圖爲RRM-TD行走機械臂,下圖爲太空碎片捕獲機械手。圖片來源:ISRO
印度對於遙感極其重視
印度一直希望在太空部署強大的合成孔徑雷達與光學成像相結合的遙感星座,巨大的民用和軍用價值不言而喻。SDX01和SDX02在完成對接和分離操作之後,將執行後續的太空任務,整體傾向於偵察、遙感。
SDX01上搭載的高分辨率相機(HRC),憑藉其在特定高度下具有一定尺寸的瞬時視場角以及不同模式下相應的幅寬,能夠對目標區域進行拍攝成像,可用於獲取地面等目標的相關影像信息,從這個角度講具備類似偵察、遙感功能。
SDX02上搭載的微型多光譜有效載荷(MMX),有着特定波段範圍的可見近紅外波段,並且在相應高度下有對應的瞬時視場角和幅寬,這種多光譜成像能力有助於對自然資源、植被等情況進行觀測和分析,也符合常見遙感任務的範疇。
還有兩個載荷跟合成孔徑雷達有關。GLX-SQ項目用於演示在太空環境中合成孔徑雷達(SAR)圖像的生成、採集以及處理過程。其目標是在10分鐘以內完成圖像處理和壓縮工作,將400兆字節的原始數據壓縮至不足1.5兆字節。
伐樓拿項目(Varuna,印度掌控秩序與水的神)驗證立方體衛星的合成孔徑雷達能力。單個小型立方體衛星的合成孔徑雷達性能當然比不過專業的大衛星,但是其造價極其低廉,組網以後性能相當可觀。通過組網形成衛星星座,可以增加重訪率,也就是對同一區域能夠更頻繁地進行觀測成像,實現對目標區域的近實時、全方位監測。
印度要造空間站,太空交會對接是必修課。圖片來源:ISRO
如何評價印度的首次
美俄的首次,現來看來畢竟原始,當然無法用上星間鏈路和差分全球定位導航系統這些高新技術。跟美俄中的首次相比,印度的首次太空對接試驗,喫了時代技術進步的紅利,總體水平不算太低,很有印度式精打細算風格。比如與國際主流接軌的周邊式設計,在一定程度上反映了印度航天技術的現代化水平和國際適應性,爲未來與其他國家開展航天合作或國際空間站對接任務提供了技術接口的可能性。
通過此次試驗,印度在航天資源利用上達到了新的高度,PSLV-C60火箭的多功能應用,從單純的運載工具轉變爲集發射、實驗平臺於一體的綜合平臺,大幅提升了航天任務的性價比,爲其後續航天項目的經濟可行性提供了良好範例。
更爲關鍵的是,此次試驗緊密契合載人航天發展脈絡,合作與非合作目標交會對接技術的驗證,是印度邁向載人航天實質性階段的重要里程碑,爲印度自主建設空間站和開展載人登月計劃築牢了前期技術根基。
印度此次太空對接雖取得階段性成果,但也需清醒認識到其航天之路仍佈滿荊棘。過往經驗表明,印度在軍工和科研項目上常受延期困擾,阿瓊坦克與LCA戰鬥機便是例證。航天領域技術複雜程度更甚,後續任務挑戰重重。
儘管此次展示了一定技術實力,但在長期穩定推進太空項目、確保技術持續升級以及大規模應用轉化等方面,印度仍需投入大量精力,接受時間與實踐的嚴格檢驗,其能否真正在全球航天競爭中站穩腳跟並實現長遠目標,尚有待進一步觀察,未來充滿不確定性與艱難險阻。