
數據是具身智能的燃料。然而生活中隨處會用到的力信息的採集,卻是現有諸多大規模數採系統普遍面臨的一大難點。傳統的力傳感器(Force-torque sensor)昂貴,沉重且脆弱,動輒上萬元成本的設備在遇到衝擊時極易永久損壞;更靈活的觸覺傳感器(Tactile Sensor)仍不成熟,短暫的使用壽命和校準的困難都極大限制了其應用規模。
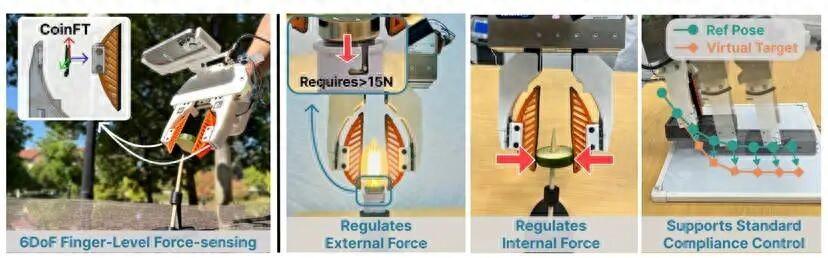
爲了解決力反饋的難題,斯坦福大學團隊開發了名爲 UMI-FT 的系統,他們在手持式數採設備 UMI 的每個手指上安裝了一個硬幣大小的六維力覺傳感器 -- CoinFT。它能感知到每個手指受到的全部六個方向的力和力矩。這個傳感器只有 2 克重,當機器人拿着燈泡去找插座的時候,它能實時感受到自己手指所受到的所有力,輕了它就加把勁,重了它就松一點,幾乎能夠像人手一樣細膩。CoinFT 能夠像傳統工業力傳感器一樣進行標準化校準,並且能夠安全承受很大的衝擊力而不損壞。
(來源:https://arxiv.org/abs/2601.09988)
論文作者侯一凡告訴 DeepTech,這套方案的意義在於讓帶力反饋的大規模數據採集變得容易實現。以前的大規模數據採集基本只記錄位置信息和視覺信息,力覺因爲成本和技術難度很難規模化。UMI-FT 提供了一個低成本、高一致性、可規模化的力覺數據採集方案,爲訓練具備柔順操作能力的機器人策略鋪平了道路。
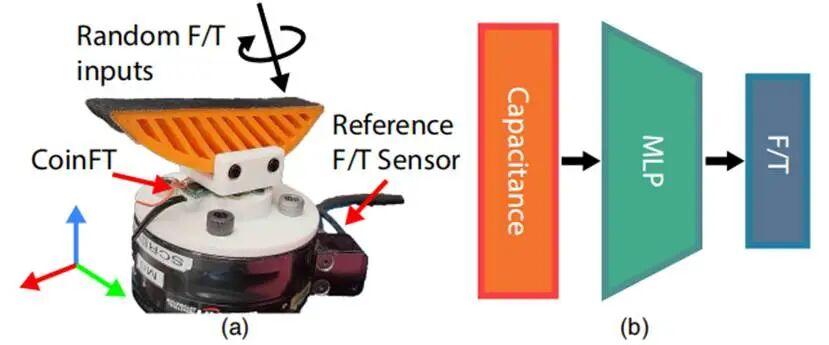
這個系統的核心是一個叫做 CoinFT 的微型傳感器,直徑 20 毫米,厚度只有 3 毫米。其內部結構由幾層帶橢圓支柱的介電材料組成,受到壓力時電容會發生變化。還有一個五層的神經網絡把這些電容值換算成爲力和力矩,校準後的精度非常高,力的誤差在 0.15 到 0.58 牛之間,力矩誤差在 17 到 231 毫牛米之間。相比之下,傳統工業使用的六軸力覺傳感器又大又貴,一個就要幾萬塊錢,而且特別嬌氣一不小心就會被摔壞。而 CoinFT 成本只有 10 美元,既耐摔又耐撞。
(來源:https://arxiv.org/abs/2601.09988)
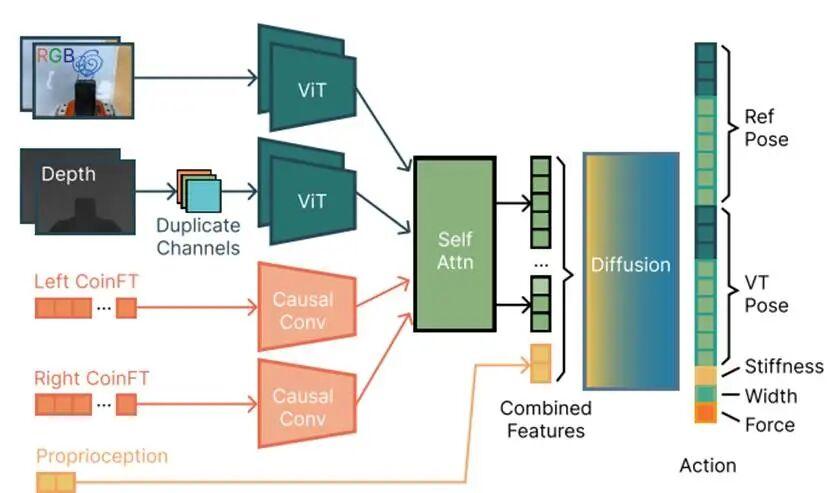
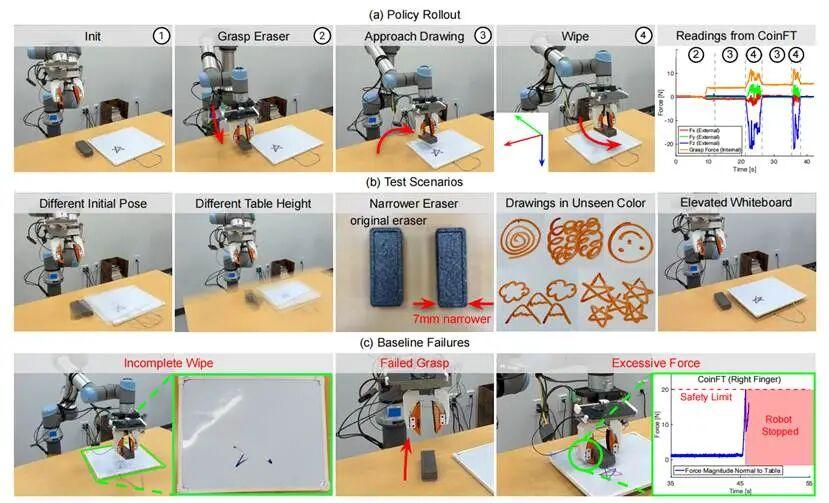
而前面提到的 UMI-FT 系統不僅是增加了傳感器,還把蘋果手機綁在了機器人的手上。手機負責提供 RGB 攝像頭、超廣角攝像頭、深度攝像頭和姿態數據,刷新率從 10 到 60 赫茲不等。指尖的力覺傳感器以 360 赫茲的速度進行超快採樣,所有數據都會被記錄下來。訓練時,研究團隊採集了 200 到 630 組不等的人類演示數據,每組數據都包含了圖像、深度、姿態和每個手指的六維力覺信息。然後,他們使用這些數據訓練了一個自適應柔順策略模型(ACP)。這個模型會輸出機器人的目標位置、虛擬目標位置、剛度矩陣、抓握力和夾爪寬度。底層有兩個控制器在同時工作,腕部柔順控制器根據兩個手指傳來的力和力矩,調整機器人手臂的位置和姿態,抓握力控制器則負責調節手指夾緊的力度。
(來源:https://arxiv.org/abs/2601.09988)
在潛在應用場景上:在工廠裏,機器人可以插拔精密的電子連接器,或者裝配帶有卡扣的塑料件;在醫療領域,手術機器人可以感知縫合傷口時手術針刺穿組織的阻力變化,操作更加安全;在家庭服務中,機器人可以幫你擰開瓶蓋、打雞蛋和擦桌子。
(來源:https://arxiv.org/abs/2601.09988)
總的來說,本次成果等於給機器人裝上了一層皮膚,讓機器人擁有了觸覺,讓它能夠感知自己用了多大力氣,以及外界給了它多少的反作用力。目前,研究團隊已經把這套系統的硬件設計和軟件代碼全部開源。任何實驗室或者機器人愛好者,都可以用幾千塊的成本複製一套用來訓練自己的機器人。
參考資料:
相關論文
https://arxiv.org/abs/2601.09988
倉庫https://umi-ft.github.io/
排版:胡莉花



