如何讓機器人擁有媲美人類指尖的觸覺?一項發表於《自然·材料》的新研究爲此提供了利器。
來自中國科學技術大學和英國劍橋大學的研究人員打造出一款只有指尖大小的三維力傳感器陣列,能像人類皮膚一樣感知壓力的大小和方向,靈敏度和空間分辨率比目前最先進的傳感器高出一個數量級。這一突破性成果在近日以“Multiscale-structured miniaturised 3D force sensors”爲題,發表於材料科學領域頂刊 Nature Materials。
(來源:https://doi.org/10.1038/s41563-026-02508-7)
論文第一作者兼共同通訊作者、中國科學技術大學貟國霖特任教授告訴 DeepTech:“我們目前重點推進傳感器在人形機器人的靈巧手上的應用。通過和中國科大人形機器人研究院張世武副院長開展合作,同時探索與相關企業的合作,接下來計劃把傳感器集成到真實機器人的指尖上。”
他同時指出,真要實現技術落地還得解決一系列工程挑戰。“目前實驗室的傳感器耐久性測試約爲三萬次循環,而滿足工業應用通常要求十萬至一百萬次起步,穩定性還得大幅提升。另外還有佈線問題,實驗室用的光刻佈線方法成功率不高,尤其是在大規模製造時更難,因此需要與工程技術成熟的產業方合作解決。”
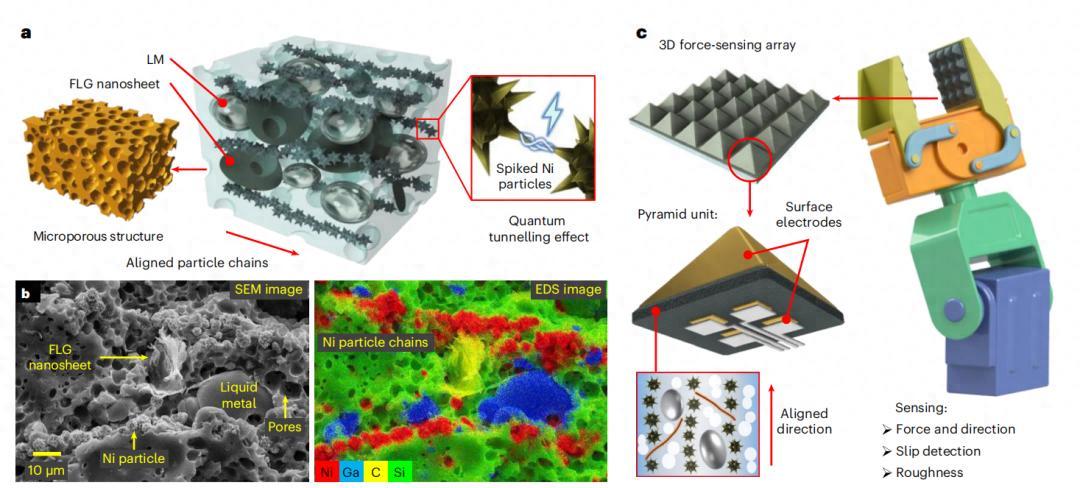
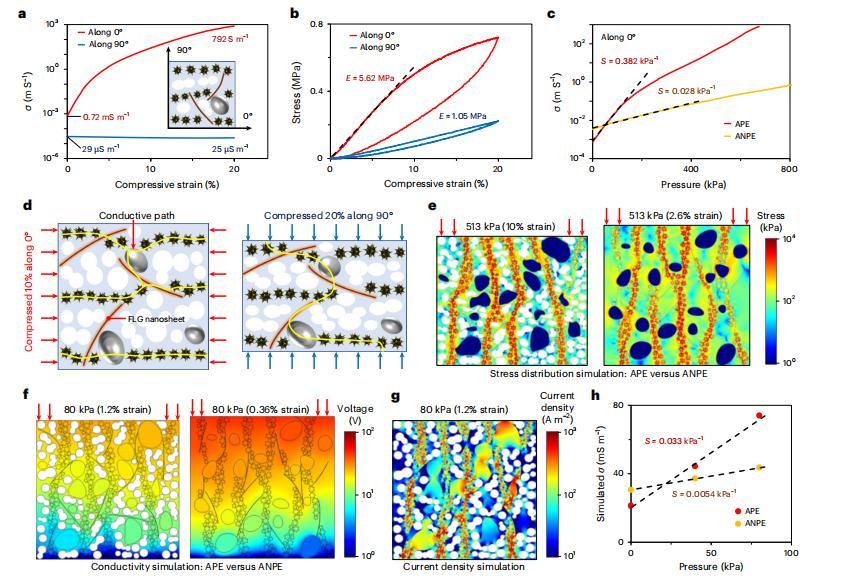
說回這款傳感器,它的核心是一種叫做 APE 的混合材料,全稱是各向異性多孔彈性體,裏面裝着三樣東西:帶有尖刺的鎳顆粒、石墨烯納米片以及液態金屬液滴。
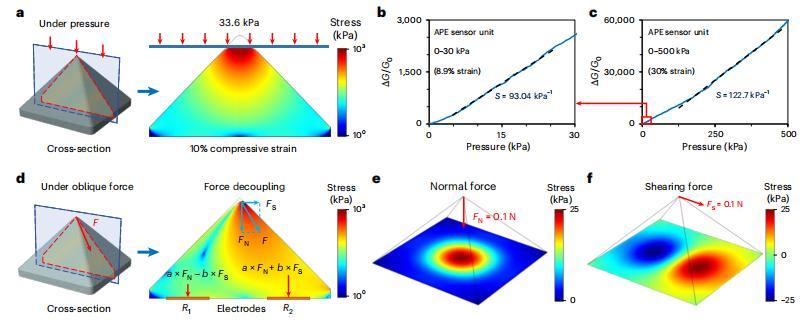
鎳顆粒在磁場作用下排列成爲一條條鏈子,石墨烯像橋一樣把這些鏈條連接起來,液態金屬則充當可以變形的節點。整個材料被打造成微米級的小孔結構,最後被做成由邊長 200 微米的小金字塔組成的陣列,每個金字塔就是一個獨立的傳感單元。
人類手指可以感知壓力、震動、剪切力和拉伸應變,依靠的是皮下四種不同的機械感受器。這套系統花費了數百萬年進化而來,至今仍然是觸覺感知的黃金標準。而本次研究人員造出來的這個傳感器,在 200 微米見方的尺寸裏,實現了對於三維力的大小和方向的同時測量,精度達到兩度以內,靈敏度最高達到 120/kPa,它的觸發力僅 0.9 微牛頓,也就是連一粒沙子的重量都可以檢測到。
(來源:https://doi.org/10.1038/s41563-026-02508-7)
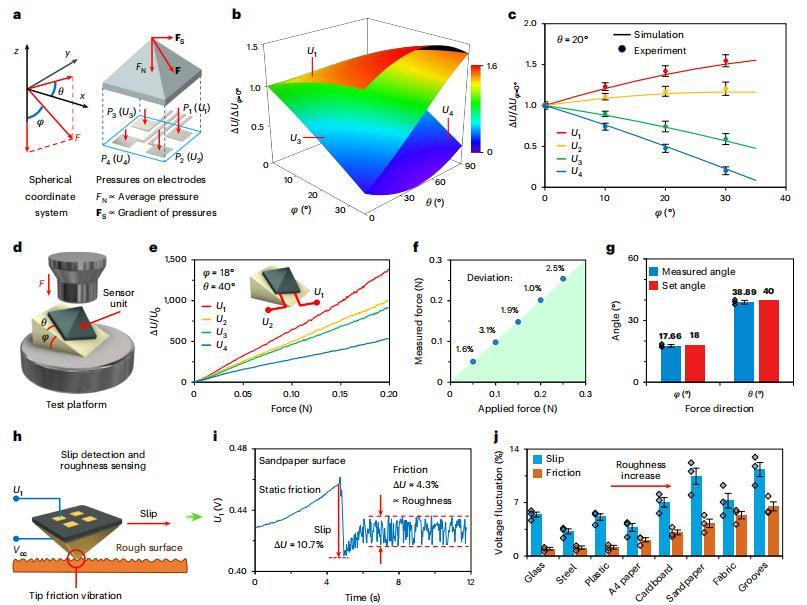
背後的原理並不複雜,金字塔型的結構在受力的時候,底部的四個電極會輸出不同的電壓信號。垂直下壓的時候,四個電極的電壓變化是一樣的;斜着推的時候,力指向的一側電極電壓更大。通過計算四個電極的電壓差值,就能反推出來力的方向、角度和大小。研究人員使用有限元模擬驗證了這個模型,實際測試中力測量偏差小於 5.3%,角度偏差小於兩度。
這個傳感器還能檢測滑動,也能估計表面粗糙度。當物體開始從傳感器表面滑脫的時候,剪切力會突然下降,導致對應電極的電壓瞬間跳變。研究人員使用 120 目砂紙測試,電壓跳變幅度達到 10.7%。這個信號可以直接用來控制機械手,在物體滑脫前瞬間加大夾持力。此外傳感器還能像人類手指一樣通過撫摸時的振動估測物體的粗糙度,用不同粗糙度的材料測試,從光滑玻璃到溝槽深度爲 126 微米的粗糙表面,電壓波動幅度從 0.95% 線性增加到 6.5%。
(來源:https://doi.org/10.1038/s41563-026-02508-7)
研究人員做了一個演示實驗:把四個 4 毫米大小的傳感器單元集成到機械手上,讓它去抓一個大小質量未知的紙筒。結果顯示,傳感器在接觸紙筒的瞬間檢測到 11 毫牛的壓力,這個力度小到紙筒幾乎沒有變形。機械手根據這個信號調整姿態,成功把紙筒提了起來,還測出了它的重量是 0.74 克,誤差只有 3%。同樣的情況換成商用傳感器,檢測觸發極限是 180 毫牛,一碰就把紙筒捏扁了。
另一個演示更精彩,研究人員讓機械手去抓一個重量和大小未知的鐵塊,並轉移到高度未知的平臺上。傳感器在加持過程中實時監測傳感器四個電極的電壓。當鋼塊開始下滑的時候,剪切力突然掉了 5%,控制系統瞬間響應,加大夾持力把鋼塊穩住。整個過程裏,機械手還測出了鋼塊和傳感器之間的摩擦角大約是 32 度,這個數據可以用來反推接觸面的摩擦係數。放下鋼塊的時候,傳感器通過剪切力歸零判斷出已經接觸地面,從而會自動鬆手。
(來源:https://doi.org/10.1038/s41563-026-02508-7)
爲了展示微型化的極限,研究人員還做了邊長 200 微米的微傳感器陣列,每個單元比圓珠筆尖還小。他們把金球和銦球依次放在陣列上,傳感器能夠根據受力大小和方向準確測出不同球體的重量和直徑,進而推算出來密度,區分出兩種不同的金屬材料。這個尺寸的傳感器可以裝進顯微操作器或者微型機器人裏,在顯微鏡下操作細胞或者微電子元件。
這種材料的製備過程也很有意思。所有原料先在常溫下低速攪拌混合,然後壓進三維打印的模具裏,放在 500 毫特斯拉的磁場中 80 度固化 12 小時。最後在 140 度下加熱 3 小時,把造孔劑蒸發掉,留下互相連通的多孔結構。整個流程和工業上的高分子材料生產沒有什麼兩樣,意味着可以實現大規模的製造。

圖 | 貟國霖(來源:受訪者)
需要說明的是,該傳感器當前只能感知力信號,目前研究人員正在開展一個新項目,計劃將溫度、溼度的傳感功能也集成進觸覺陣列,再結合機器學習,讓傳感器能識別材料的剛度、種類,甚至複雜的紋理信息。
參考資料:
相關論文
https://doi.org/10.1038/s41563-026-02508-7
運營/排版:何晨龍