
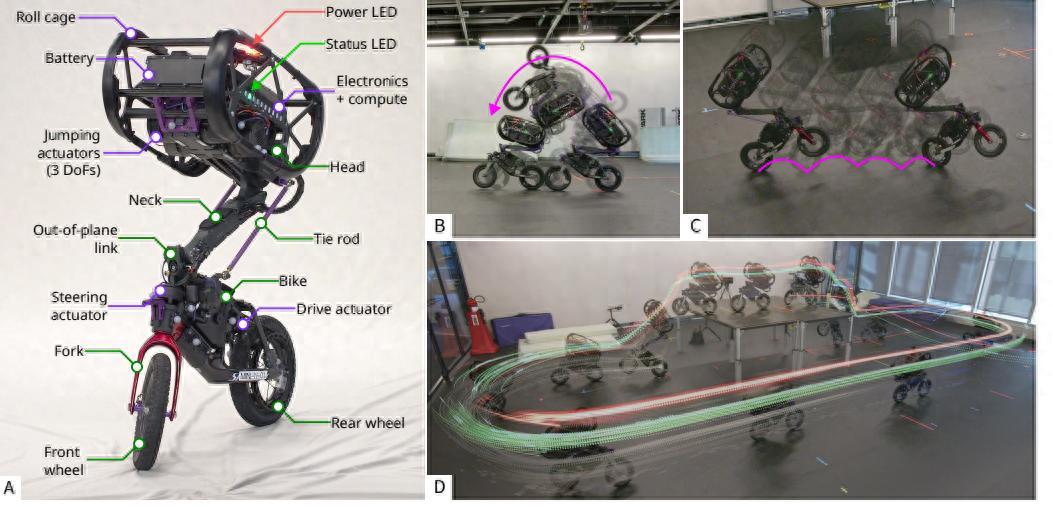
能飛檐走壁的機器人面世!近日,來自美國非營利研究機構 RAI、美國卡內基梅隆大學以及美國麻省理工學院的研究人員造出一款名爲 UMV(Ultra Mobility Vehicle)的自行車機器人,它可以像專業車手一樣原地定車、單輪跳躍、甚至能在空中翻跟頭,最高能夠跳上一米高的平臺,比它自己站立時還高出 30%。
這臺重 23.5 公斤的機器人只有一個自行車的基本骨架,外加一個會動的腦袋。當它在平地上奔跑時,最高速度能夠達到每秒 8 米,比人類百米衝刺還快。遇到臺階或者障礙物的時候,它不需要繞路,直接原地起跳就能翻過去。更厲害的是,它只用後輪就能站立,能像雜技演員一樣原地轉圈,也能連續跳躍着前進。
(來源:https://arxiv.org/abs/2602.22118)
相關論文的第一作者是 Ben Bokser,他目前是 RAI 的機器人工程師,此前畢業於美國卡耐基梅隆大學。

圖 | Ben Bokser(來源:https://www.linkedin.com/in/ben-bokser/)
當然,這項成果不只是 Ben 一個人的功勞,全部作者達到幾十位之多。

圖 | 相關論文的全部作者(來源:https://arxiv.org/abs/2602.22118)
研究人員給它設定的目標非常明確:既要像自行車一樣高效省力,又要像腿足機器人一樣靈活便捷。傳統的腿足機器人雖然有十幾條甚至更多的活動關節,能夠跨過各種障礙,但是結構複雜、造價昂貴、耗電驚人。而普通自行車雖然簡單輕便,但是遇到臺階只能繞道。UMV 則試圖使用最簡答的結構,同時解決這兩個問題。
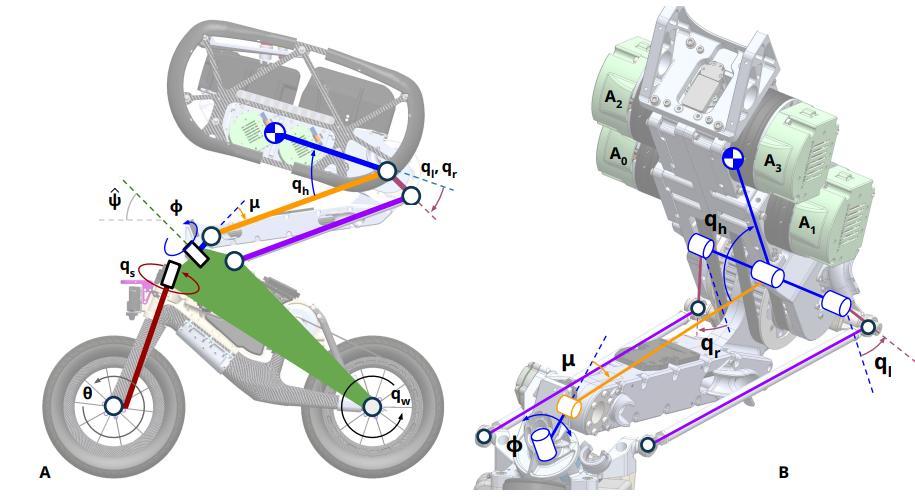
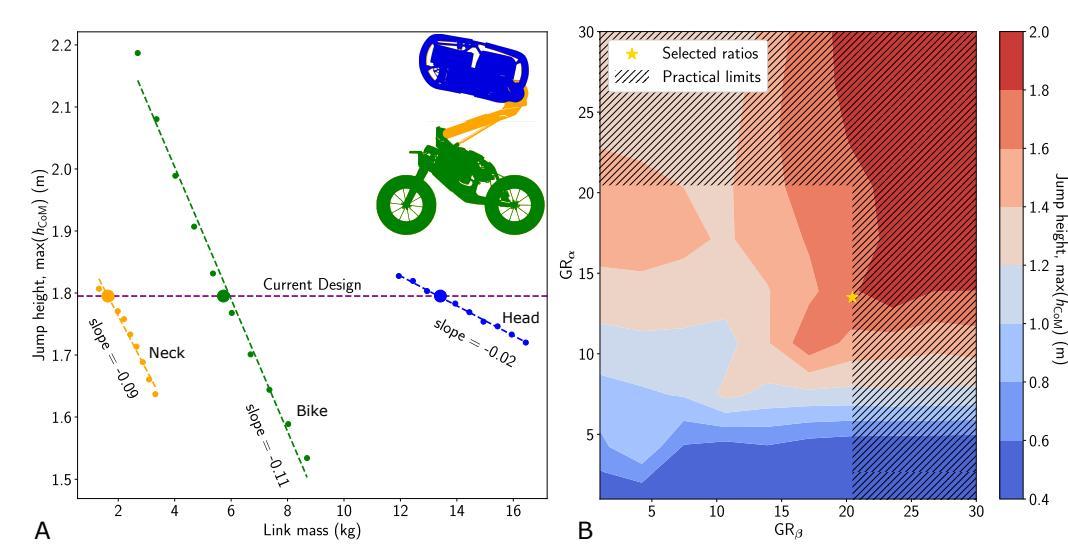
UMV 只有五個活動關節,兩個負責基本的騎行和轉向,另外三個藏在那個沉重的腦袋裏,通過一套空間連桿結構連接到車身上。當需要跳躍的時候,頭部的電機會把整個身體像壓彈簧一樣壓縮,然後瞬間釋放,把自己彈到空中。研究人員在設計這個結構時,使用計算機模型反覆優化,最終讓 23.5 公斤重的 UMV 跳出了超出自己身高 30% 的高度。

(來源:https://arxiv.org/abs/2602.22118)
光有硬件肯定是不行的,要想讓 UMV 在真實世界裏穩定完成這些高難度動作,必須有一套足夠聰明的控制系統。研究人員沒有使用手寫代碼的方式逐條告訴機器人每一步該怎樣做,改爲使用強化學習的方式。他們先在虛擬世界裏搭建了一個和 UMV 一模一樣的數字模型,然後讓其一遍一遍地練習。
就像小孩子學騎自行車一樣,摔倒了爬起來,慢慢摸索出來平衡的感覺。這個過程在超級計算機上並行運行,相當於同時有成千上萬個機器人在虛擬世界裏練習,只用了十幾個小時就積累了相當於人類練習幾百年的經驗。
(來源:https://arxiv.org/abs/2602.22118)
最終學會的技能可以直接遷移到真實的 UMV 身上,不需要任何額外的調整,真正實現了零樣本遷移。研究人員發現,這個學習出來的策略甚至自己發明了一些人類車手經常使用的技巧,比如在使用後輪跳躍時它會在接觸地面的瞬間先把輪子向後滾一下然後再向前發力,以便更好地保持平衡。
在做前空翻的時候,它會在空中收緊身體以便減少轉動慣量,讓轉速瞬間提升到每秒 17 弧度,接近每秒一圈半,然後在落地之前展開身體緩衝衝擊。

(來源:https://arxiv.org/abs/2602.22118)
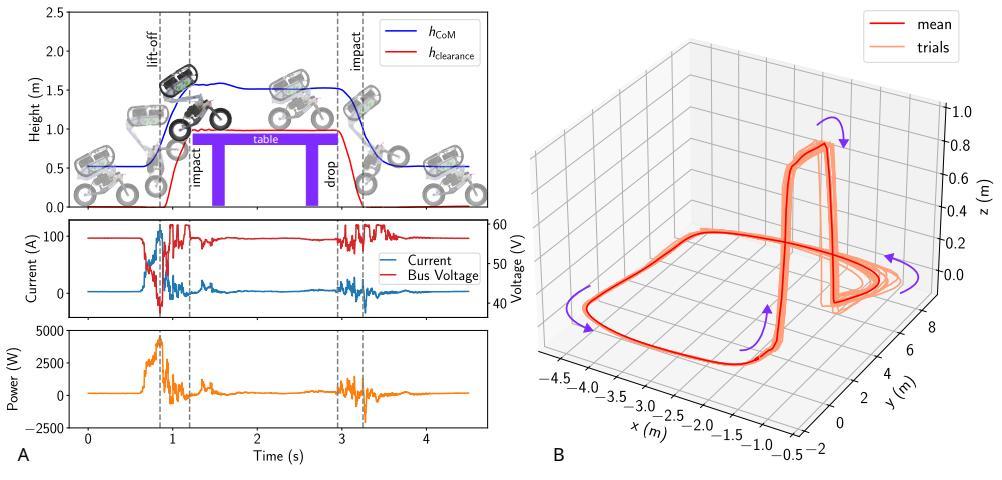
在連續的跳躍實驗中,研究人員讓 UMV 反覆跳上一米高的桌子然後再跳下來,累連續執行 15 次。每次起跳的軌跡幾乎完全重合,說明這個學習出來的控制策略極其穩定。
即使在落地衝擊的瞬間,控制系統也能快速恢復平衡,繼續執行下一輪任務。據瞭解,這在機器人領域是一個相當難得的成就,因爲衝擊往往會導致狀態估計出錯或者控制失效,但是 UMV 的學習算法把這些都考慮了進去。
(來源:https://arxiv.org/abs/2602.22118)
當然,完成這些動作對於硬件的要求非常高。在起跳的瞬間,電機的輸出功率會飆升到 4.5 千瓦,相當於同時打開 45 個 100 瓦的燈泡。電池電壓會瞬間下降 20 伏,電機控制器要承受巨大的電流衝擊。
研究人員甚至專門修改了電池保護板的固件,允許它在短時間內超出設計功率放電,目的就是爲了滿足這些極限動作的需求。他們還爲每個剛性部件都安裝了加速度傳感器,累計使用了三個三軸 IMU,並實時測量了每個部件的線性加速度、角速度和角加速度,以便在高速運動中準確判斷前後輪的觸地狀態。
(來源:https://arxiv.org/abs/2602.22118)
UMV 的設計思路里還蘊含着這樣一個哲學思想:那就是與其給機器人裝上覆雜的腿和腳,不如在簡單的自行車構型上加一個會動的配重塊。這個配重塊就是那個沉重的腦袋,它可以在三維空間裏自由移動,改變整個機器人的中心位置。跳躍的時候,腦袋會向上猛甩;平衡的時候,腦袋會左右搖擺;翻跟頭的時候,腦袋會進行收緊。也就是說,所有運動都依靠這個腦袋的動作來實現。
研究人員使用了一個名爲可控性的量化指標來優化腦袋的運動軸方向,最終確定那個關鍵關節的固定角度得讓旋轉軸大致指向後輪的軸心,以便能夠實現最高的控制效率。這也說明機器人設計有時也遵循少就是多的原則,把簡單的結構發揮到極致也能創造出驚豔的功能。

(來源:https://arxiv.org/abs/2602.22118)
目前,UMV 還需要實驗室裏的動作捕捉系統來幫助它感知自己的位置和姿勢,因爲運動範圍實在是太大,衝擊非常的猛烈,因此使用普通的視覺里程計很難穩定工作。不過,它已經能夠支持完全自主的狀態估計,眼下已經在一些初步的戶外測試中驗證過。未來的版本預計將會完全走出實驗室,在真實的山地、叢林和城市街道里進行極限測試,最終有望用於快遞、巡檢、救援和探險等場景。
參考資料:
相關論文:
https://arxiv.org/pdf/2602.22118
https://www.linkedin.com/in/ben-bokser/
https://www.benbokser.com/spryped.html
運營/排版:何晨龍



