靈巧的機器人手大概是機器人學裏最吸引人也最折磨人的課題之一。人類的手能擰瓶蓋、旋鋼筆、握電鑽,也能輕輕拈起一張紙。而能接近這種靈巧度的機器人手,長期以來都是少數幾家公司的專利產品,十幾萬美元起步,維護成本高昂,壞了還不一定修得好。對全世界絕大多數做靈巧操作研究的實驗室來說,硬件本身是最大的瓶頸,不是算法寫不出來,是手買不起。
2026 年 3 月 15 日,蘇黎世聯邦理工學院(ETH Zurich)軟體機器人實驗室的團隊正式推出了 ORCA Hand 的商業化產品線,同步成立了 ORCA Dexterity 公司來運營這個項目。自相關的學術論文於 2025 年 4 月掛上 arXiv,其已經在多個會議上展出過,此次發佈後它終於從實驗室原型走向了可以訂購和複製的標準化產品。
圖丨相關論文(來源:arXiv)
ORCA Hand 是一隻 17 個自由度(Degrees of Freedom,DoF)的仿人機器人手,肌腱驅動,指尖集成觸覺傳感器,所有結構件都能用普通 3D 打印機制造,材料成本低於 2,000 瑞士法郎(約 2,200 美元,約 17,000 人民幣),一個沒有任何經驗的人 8 小時內能完成組裝。設計文件、控制代碼、仿真環境和組裝指南全部開源(項目地址:
https://github.com/orcahand)。
長期以來,靈巧操作的標杆級產品都是倫敦 Shadow Robot 公司的 Shadow Dexterous Hand,其擁有 20 個自由度,超過 100 個傳感器,是 NASA 和 OpenAI 的標配工具。但它的價格超過 10 萬瑞士法郎(約 870,000 人民幣),DEX-EE 系列起價約 7.4 萬美元,維護需要企業級支持,設計高度集成導致維修困難。
Wonik Robotics 的 Allegro Hand 便宜一些,大約 1.9 萬美元,直驅設計,但體積大、形態受限,做不到人手的靈活。卡內基梅隆大學的開源 LEAP Hand 材料成本也在 2,000 美元以下,組裝只要 3 小時,可靠性出色,但所有直驅手共享一個問題:電機嵌在手指裏,慣量大,外形臃腫,快速靈活的動作做不了。
ORCA Hand 想在這些方案中間找一個新位置:肌腱驅動保留接近人手的外形和靈巧度,3D 打印和開源壓低門檻,再通過工程設計解決肌腱系統最致命的老問題,可靠性。
肌腱驅動手的天然劣勢是肌腱(通常是尼龍釣魚線)會鬆弛、磨損,精度隨時間下降。ORCA 團隊做了幾件針對性的事。所有肌腱都繞過光滑金屬銷釘,避免直接接觸 PLA 打印件,減少摩擦。非線性路徑使用特氟龍管。電機上方有一套棘輪卷軸機構,幾秒鐘就能手動重新張緊肌腱,不需要拆任何東西。
他們還發明瞭一種“可彈出關節”(Poppable Pin Joints)。3D 打印關節的老問題是過載就斷,ORCA 的關節在受到過大外力時不會折斷,而是“脫臼”。軸承安放在弧形凹槽中,正常運行時卡得緊,碰撞時能彈出來。彈出來怎麼辦?按回去即可。不換零件,不停機。組裝的時候也是同樣的操作,按進去卡住就行。
第三個關鍵是自動校準。肌腱路由設計確保每根肌腱都穿過或接近關節旋轉中心,各關節運動因此近似線性且彼此解耦。校準時系統自動把每個關節驅動到機械極限,記錄電機位置,結合 CAD 模型中已知的關節活動範圍,算出電機到關節角度的線性映射。不需要外部傳感器,幾分鐘完成。
精度測試中,團隊用 AprilTag 標記和 60fps 攝像頭追蹤關節實際角度,發現 ORCA Hand 在 0.2Hz 和 0.5Hz 正弦波指令下的跟蹤精度與 LEAP Hand 相當,延遲在 0.2 秒以內。而且 ORCA Hand 的運動比 LEAP Hand 更平滑,後者有明顯的抖動,可能和手指內部電機的慣量有關。
可靠性測試中,ORCA Hand 連續抓握毛絨玩具 2,250 次、持續 2.5 小時,沒有出現肌腱鬆弛、電機過熱或部件損壞(實驗是主動停止的,不是因爲出了問題)。論文 v2 版本的數據顯示,這隻手承受了超過 10,000 個連續操作循環,大約 20 小時不間斷運行,沒有硬件故障。負載方面,四指抓握最大可承受 10.5 公斤(103N),單根食指可承受 2 公斤。
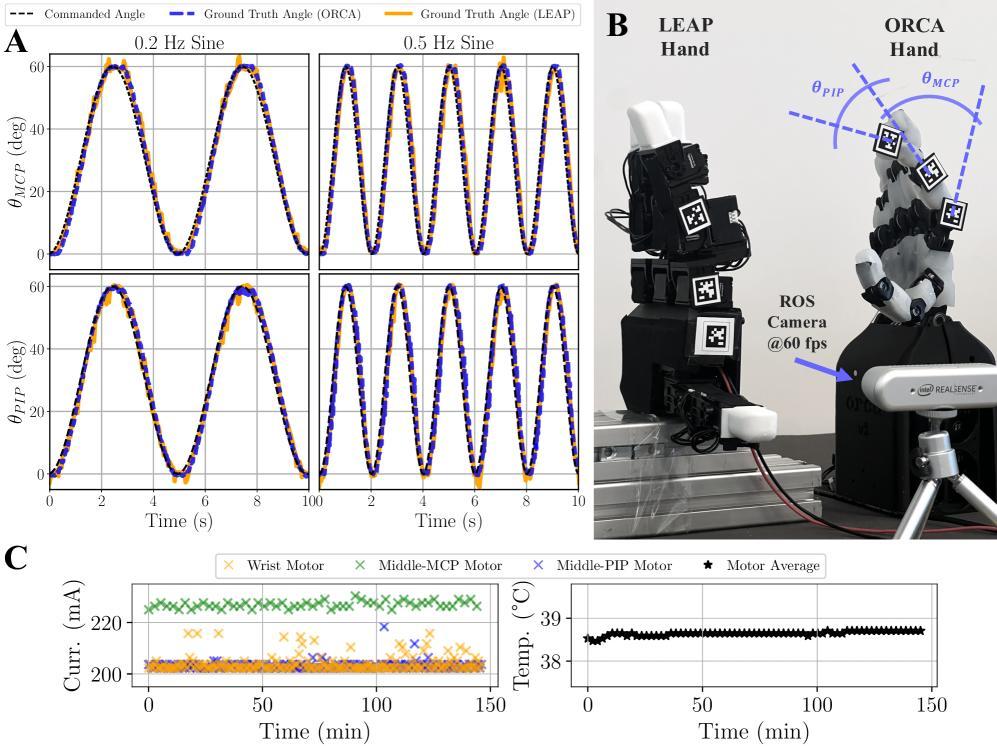
(來源:arXiv)
應用層面的演示覆蓋了三個方向。遙操作端,他們用 ROKOKO 動捕手套控制 ORCA 完成了拿筆寫字、擰開罐頭蓋、倒水、使用電鑽等精細任務。強化學習端,他們用 IsaacGym 並行訓練 4,096 個 ORCA 手模型,僅一小時訓練後就能零樣本遷移到真實硬件上完成網球的手內旋轉。模仿學習端,他們用擴散 Transformer 架構訓練了抓取 - 放置策略,其中使用顏色分割預處理的版本在測試區域內達到了 86.7% 的成功率。
觸覺傳感是 ORCA Hand 在同價位產品中一個明確的差異點。每個指尖內置力敏電阻傳感器(Force Sensing Resistor,FSR),覆蓋在硅膠皮膚下,提供二值觸覺反饋。靈敏度實測低至 0.05N,遠超標稱的 0.29N 觸發力。但論文也寫明瞭侷限:硅膠皮膚在 2m000 到 4,000 次抓取後開始老化,影響傳感可靠性;連接傳感器的細銅線在 4,500 到 7,000 次抓取後可能在關節附近斷裂。
此次商業化發佈推出了三個配置,共享同一套機械架構和固件接口。orcahand lite,9 個自由度,面向簡單抓取和演示,起價約 1,500 美元。標準版 orcahand,17 個自由度,起價約 3,500 美元。orcahand touch,17 個自由度加全指觸覺傳感,起價約 6,100 美元。
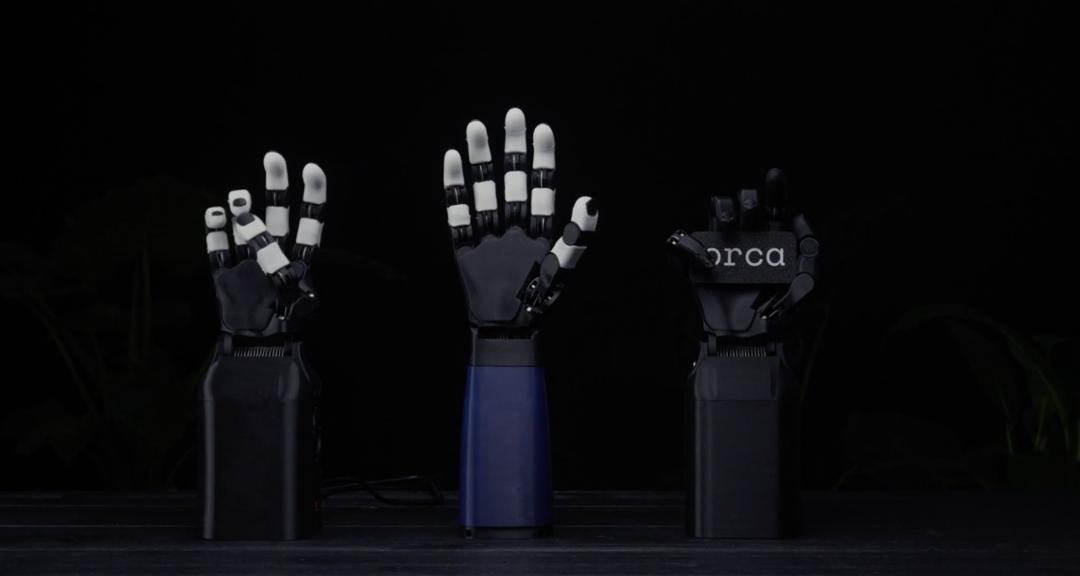
圖丨此次發佈的三款配置,從左到右是 orcahand、orcahand lite、orcahand touch(來源:ORAC Hand)
ORCA Hand 並沒有在每個維度上都超過 Shadow Hand。Shadow Hand 有 20 個自由度,超過 100 個傳感器,力反饋和觸覺分辨率遠非 ORCA 可比。Shadow Robot 與 Google DeepMind 合作的 DEX-EE 系列更是專門爲高強度機器學習實驗優化,每根手指配備光學觸覺傳感器和數百個觸覺像素點。這些能力 ORCA 目前還做不到。
但 ORCA Hand 要解決的問題不是取代 Shadow Hand。它要解決的是:全世界大量中小實驗室和高校課程組的算法只能跑在仿真裏,因爲買不起硬件。過去一兩年靈巧操作領域的軟件進展很快,擴散策略、大規模仿真訓練、零遷移強化學習,可很多團隊連一隻能用的手都沒有。ORCA Hand 把“擁有一隻靈巧手”的門檻從六位數預算降到了一臺 3D 打印機。
在論文中,團隊也提到了 ORCA Hand 目前存在的不足,例如長時間使用後仍需手動重新張緊肌腱,觸覺傳感器耐久性有待提高,銅線走線方案需要改進。他們計劃開發自動張緊機構,並將觸覺信號直接集成到學習流程中。不過,作爲一個開源項目,在全球開發者的參與下,這些問題的迭代速度或許還能更快。
參考資料:
1.https://www.youtube.com/watch?v=WNtlUViSrPg
2.https://arxiv.org/abs/2504.04259
3.https://www.orcahand.com/
運營/排版:何晨龍